
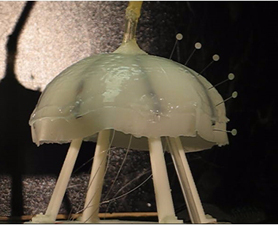
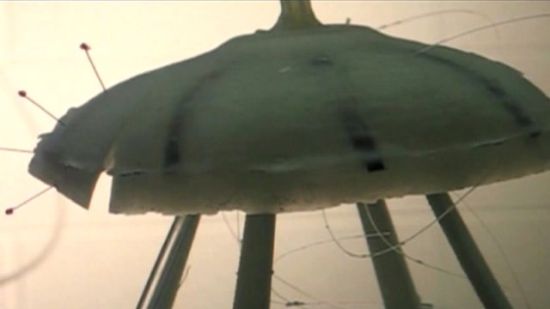
“机械水母”在水中可以像真正的水母一样伸缩游动。

水母游动的动作简单有效,因此这可以作为水下机器人的理想模型。

为了模拟水母的运动机制,机器人必须要使用有形状记忆能力的合金。
目前机械水母可以同时伸缩8节身体。
这是第一个采用外部氢作为燃料来源的水下机器人。
北京时间3月22日消息,据国外媒体报道,美国弗吉尼亚理工大学工程师约纳斯-塔德塞等人近日在美国海军研究所的赞助和支持下,发明了一种氢气动力水母机器人--“机械水母”,这种神奇的机器人在水中可以像真正的水母一样游动。目前,机械水母仍处于研发早期阶段,但研究人员表示这种机器人最终将可应用于水下营救作业。
塔德塞等人的研究成果发表于《智能材料与结构》杂志之上。塔德塞介绍说,水母游动的动作简单有效,因此这可以作为水下机器人的理想模型。此外,机械水母以氢作为燃料,从理论上讲,它的能量将取之不尽用之不竭。塔德塞表示,“据我们所知,这是第一个采用外部氢气作为燃料来源的水下机器人。”
人造“肌肉”
水母是利用其伞状体内部的环肌进行移动的。当它们收缩时,伞膜将水母的身体关闭于其中,并排出水流,从而推动身体向前移动。当肌肉放松时,伞膜又会恢复原来的形状。为了模拟水母的运动机制,机器人必须要使用有形状记忆能力的合金,也就是说所使用的材料能够记住原始形状。然后,再将这些材料包装于碳纳米管中,并涂上一层铂黑粉。
机械水母的动力来自于水中的氧和氢以及表面的铂之间的化学反应所产生的热量。化学反应产生的热量传递到机械水母的人造“肌肉”上,使其达到伸缩变形的目的。这就意味着机械水母可以从其周围的水中获得再生燃料,而不是仅仅依靠有限的电池能量。研究团队认为,机械水母的能量应该取之不尽用之不竭。
目前,这个机械水母可以同时伸缩8节身体。研究人员正在考虑如何改进,以更方便的方式单独控制每一节身体。如果能够找到解决方案,那么改进版的机械水母活动将更加灵活。
这项研究由美国海军研究所提供赞助和支持。他们希望这项发明将能够应用于美国海军和海军陆战队中。
加拿大华人网 http://www.sinonet.org/









